Personal Robotics Motor Controller
This guide contains documentation for a dual channel controller for DC motors. This controller was created by group of robotics enthusiasts from Personal Robotics discord server, who needed a mid-power dual channel motor controller supporting closed loop motor control but were not ready to pay $70 and more for existing commercial realizations. So we created our own - and made it available on Tindie: https://www.tindie.com/products/26573/
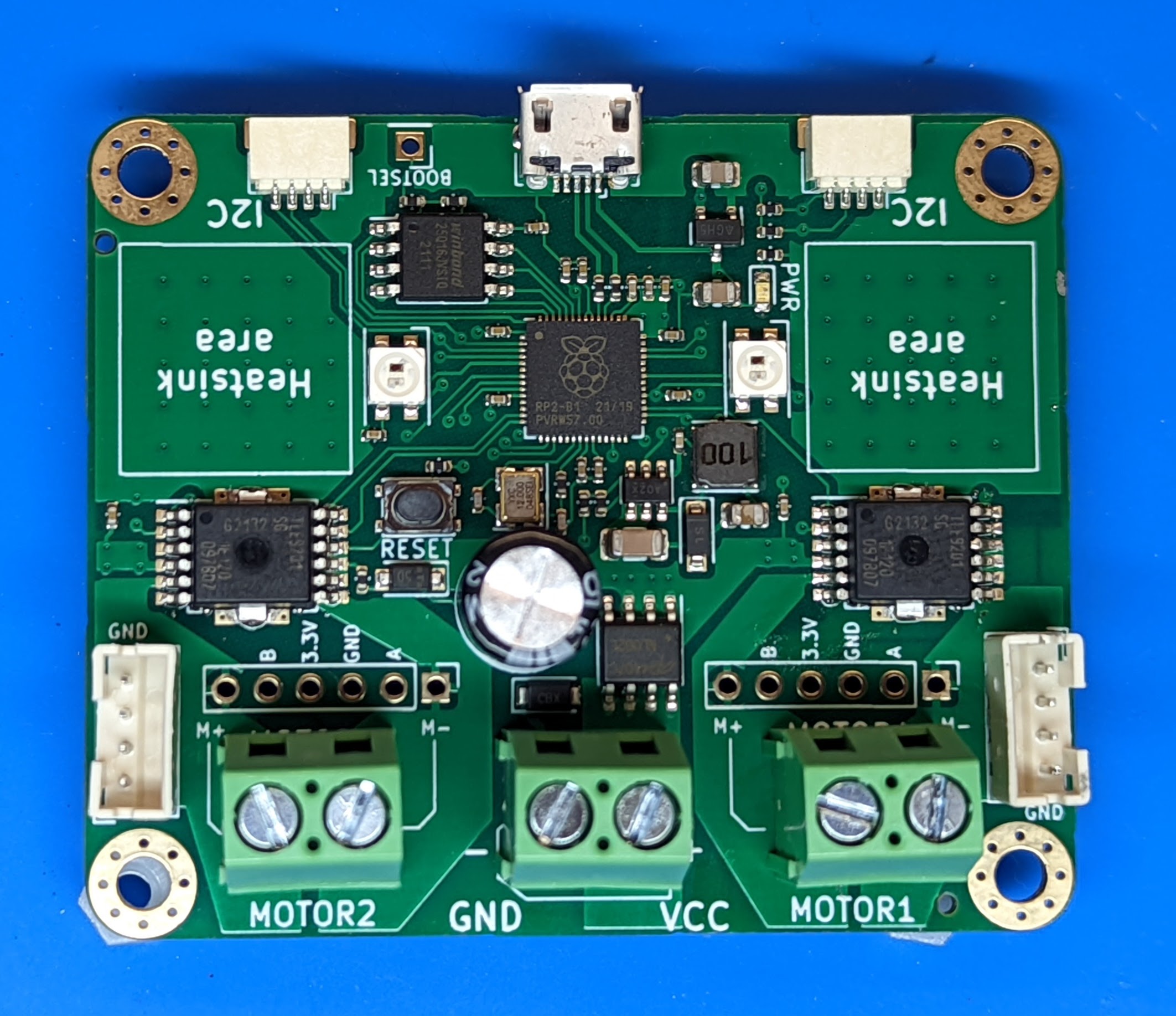
Key features of this controller are as follows:
support for 2 brushed DC motors
Motor voltage: 5-18v; reverse polarity protection for power input
Current per channel
8A peak, current limited
3.5A continuous if used without heatsinks
4.5A continuous with optional heatsinks
Support for quadrature encoders for each channel. Note: it uses 3.3v for encoders - make sure your encoders support that (many encoders require 3.5V or above)
Closed loop speed control, using PID algorithm
Variety of protection features: automatic overcurrent, overtemperature, undervoltage, and short circuit protection
Controlled by a host microcontroller or single board computer such as Raspberry Pi using I2C interface. MicroPython library is available
All design files and software are available from the project github repository under open source license.
This document describes version 2.0 of the project, released in April 2022.